Xupeng Zhu, Dian Wang, *Guanang Su, *Ondrej Biza, Robin Walters, Robert Platt
*Authors order depends on paper
Citation
@article{zhu2023grasp,
title={On Robot Grasp Learning Using Equivariant Models},
author={Zhu, Xupeng and Wang, Dian and Su, Guanang and Biza, Ondrej and Walters, Robin and Platt, Robert},
journal={Autonomous Robots},
year={2023} }
@article{zhu2022grasp,
title={Sample Efficient Grasp Learning Using Equivariant Models},
author={Zhu, Xupeng and Wang, Dian and Biza, Ondrej and Su, Guanang and Walters, Robin and Platt, Robert},
journal={Proceedings of Robotics: Science and Systems (RSS)},
year={2022} }
Idea
We formulate the planar grasp problem as a contextual bandit problem and use Q learning to learn a policy.
- Augmented state representation (ASR)
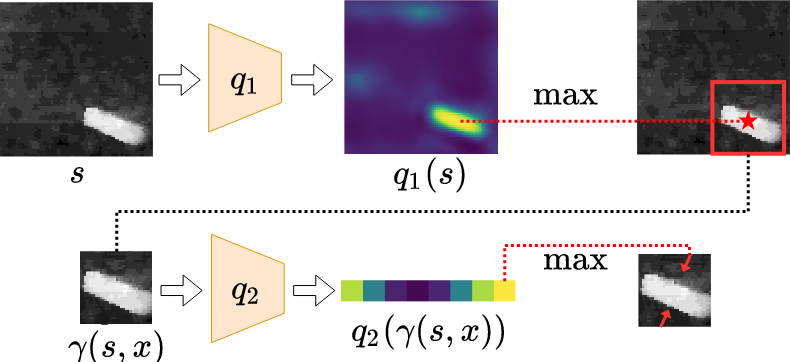
The action space for planar grasp is in 3-dimension (translation along x, y axle, and rotation along z axle). It is difficult to evaluate the entire action space in one pass for a single neural network. We instead factorize the evaluation into translation part and rotational part by q1 and q2 networks.
- Equivariant neural networks (Equ)
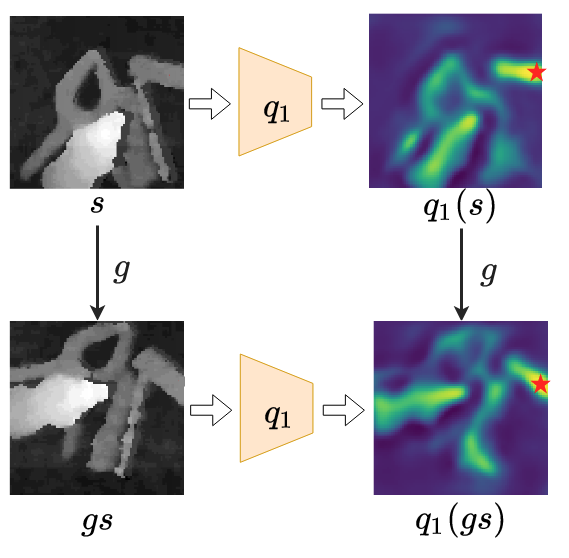
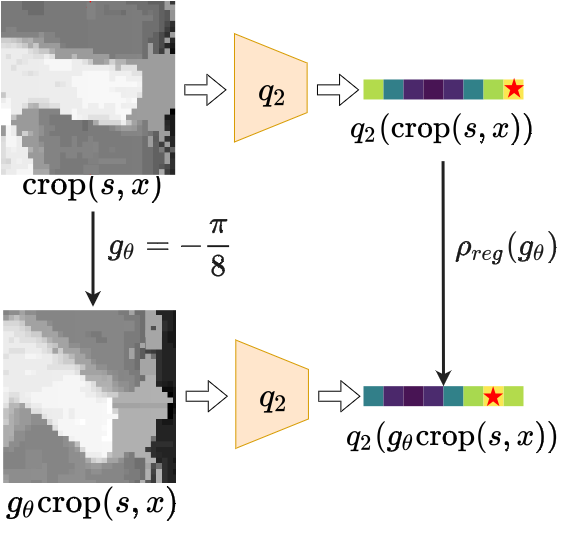
We recognize that the optimal planar grasp function is SE(2)-equivariant. We use equivariant neural networks to approximate the SE(2)-equivariant grasp function.
- Optimizations for the contextual bandit problem (Opt)
First, we adapt the loss function in ASR so that the target for the q1 network is more accurate. Second, we add an off-policy learning loss to minimize the gap between q1 and q2 networks. Moreover, we use Boltzmann exploration to explore the action space based on the learned q value.
Baseline Comparison
 |
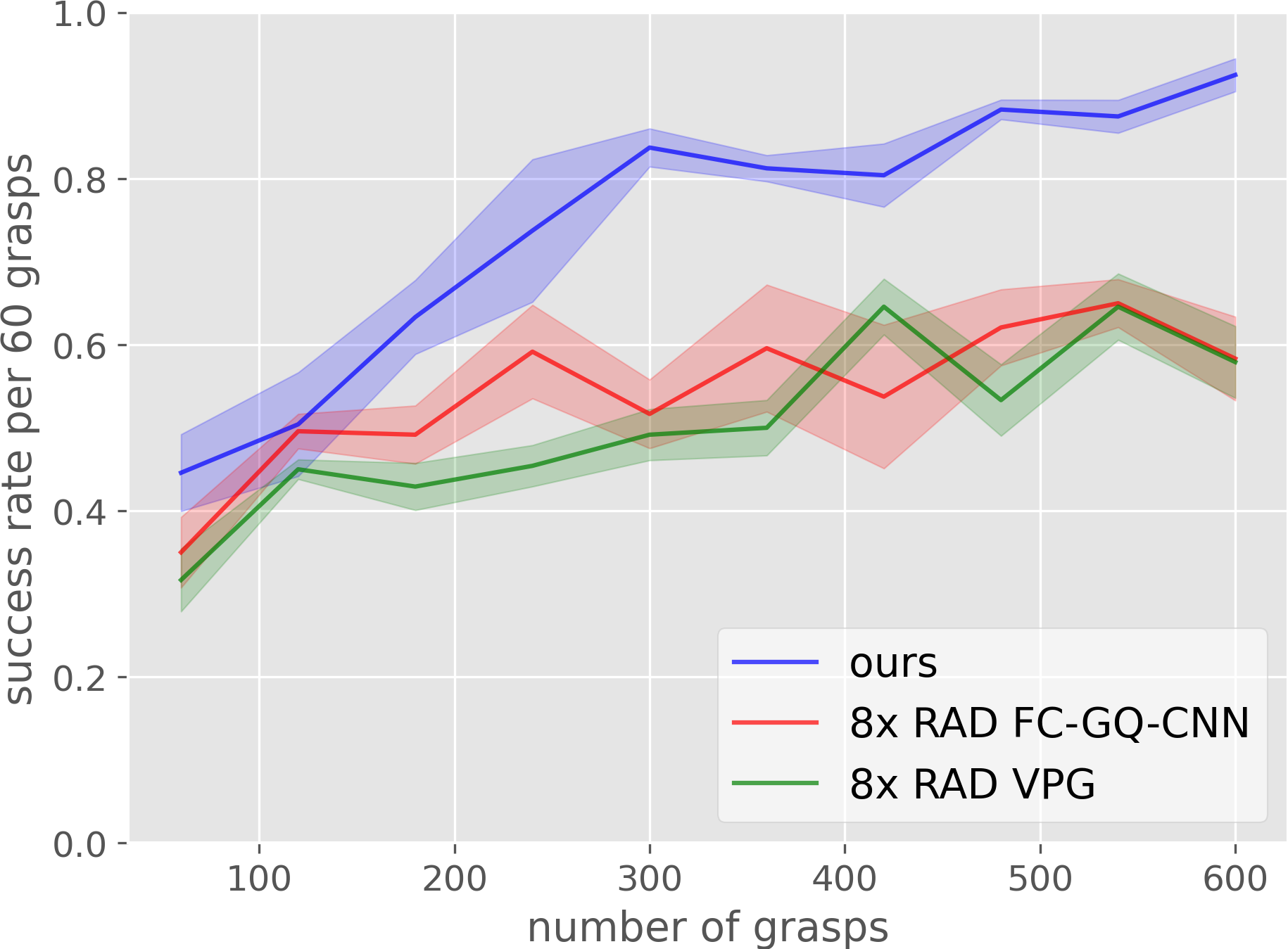 |
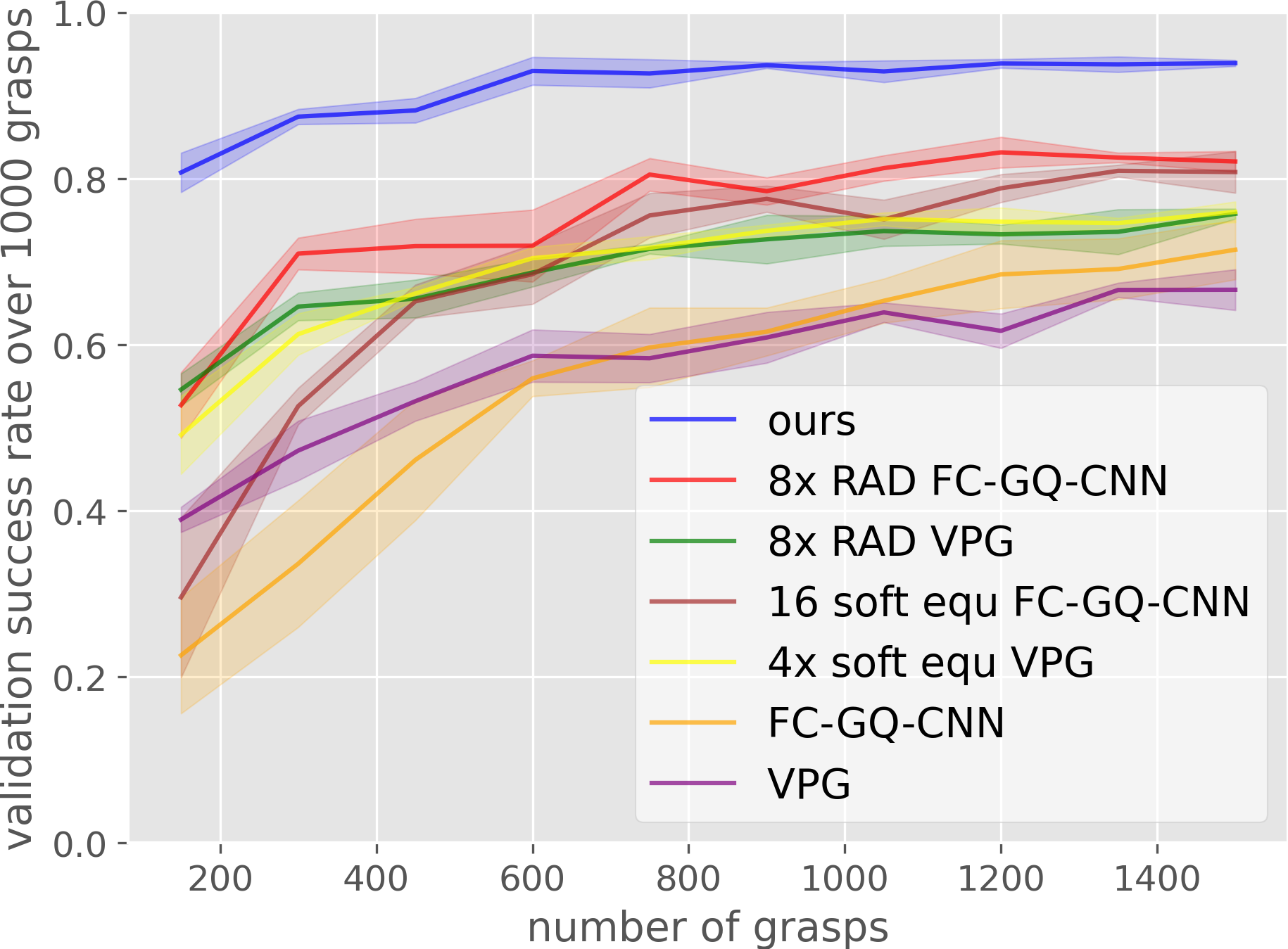
| Simulation results, curves are averaged over 4 runs. | Robot training results, curves are averaged over 4 runs. |
The baseline comparisons on both simulation and robot show that our method significantly outperforms the baselines. Our methods advantage shown in these comparisons are two folds: 1) achieves the highest sample efficiency and 2) converges to the highest grasp success rate.
The Robot Training Platform
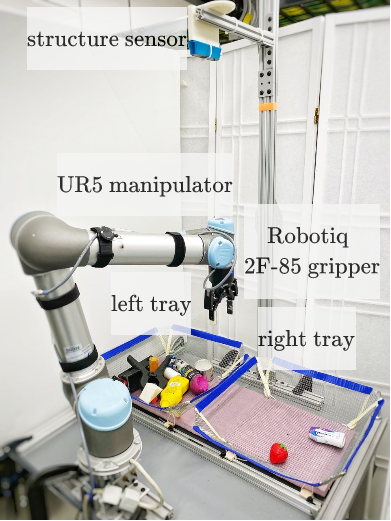
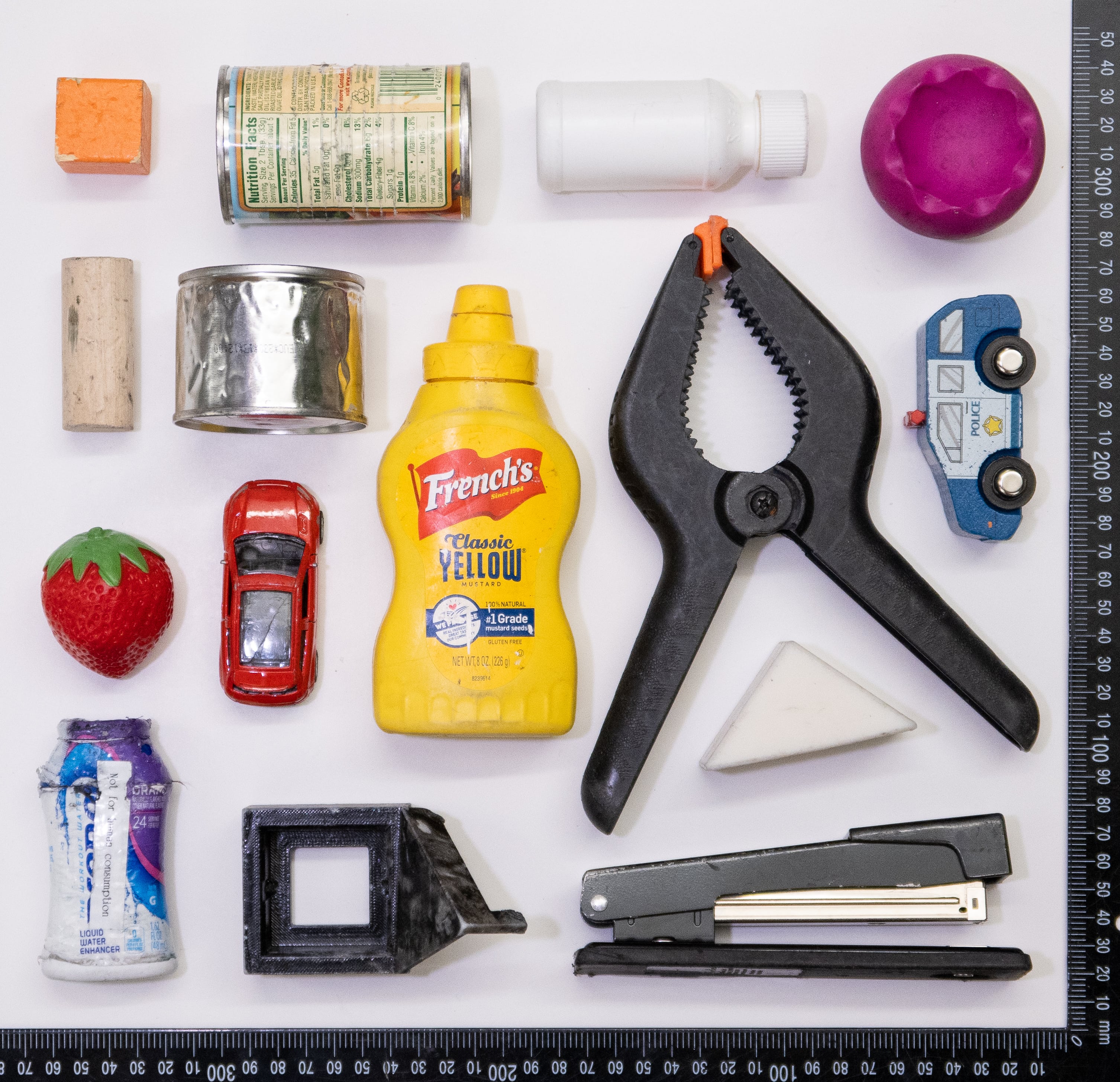
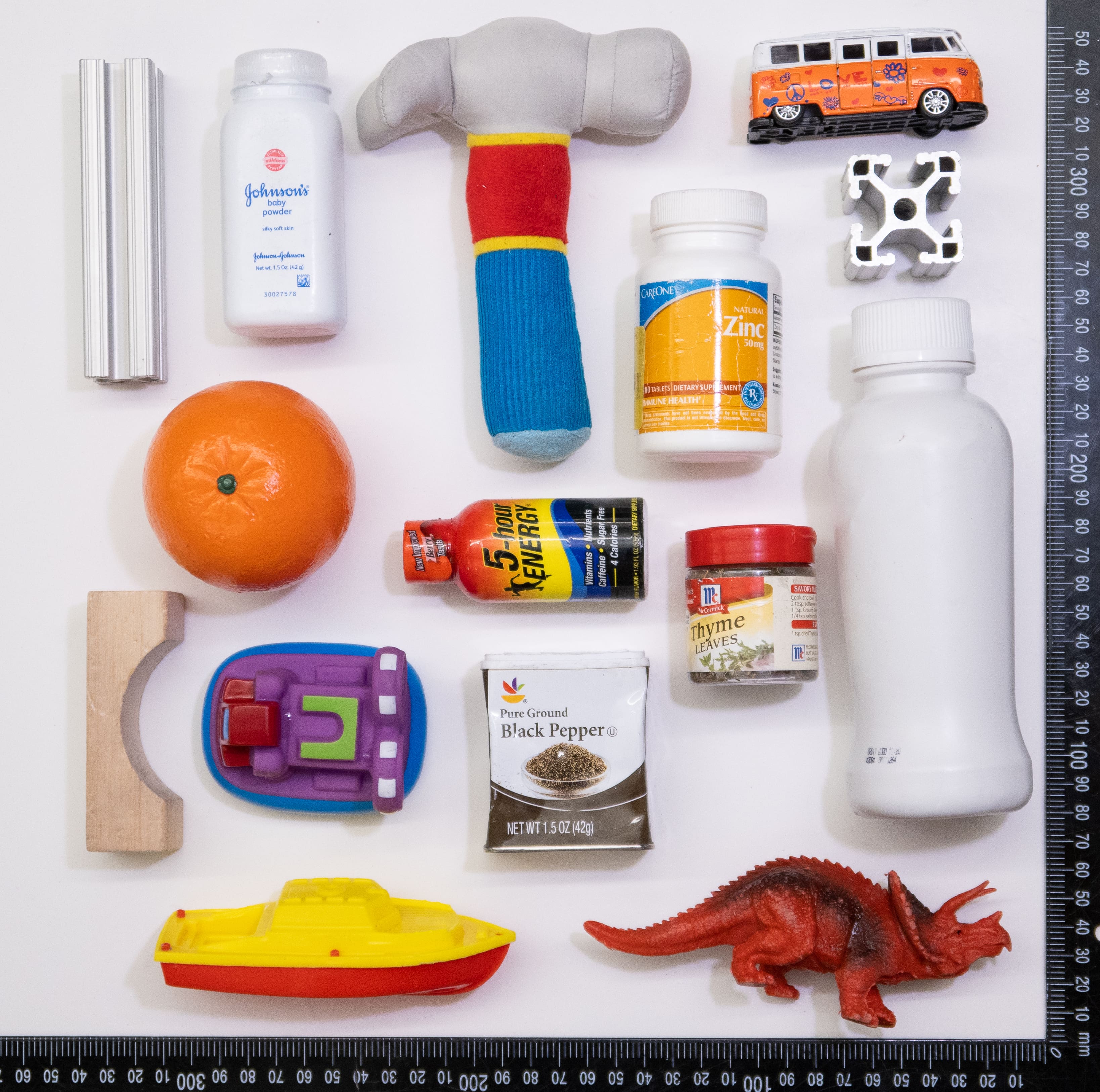
All training happens using the 15 objects shown in the middle figure. After training, we evaluate grasp performance on the 15 test objects shown in the right figure. Note that the test set is novel with respect to the training set.
At the beginning of training, the 15 training objects are dropped into one of the two trays by the human operator. Then, we train by attempting to grasp these objects and place them in the other bin. All grasp attempts are generated by the contextual bandit. When all 15 objects have been transported in this way, training switches to attempting to grasp from the other bin and transport them into the first. Training continues in this way until 600 grasp attempts have been performed (that is 600 grasp attempts, not 600 successful grasps). A grasp is considered to be successful if the gripper remains open after closing stops due to a squeezing force. To avoid systematic bias in the way the robot drops objects into a tray, we sample the drop position randomly from a Gaussian distribution centered in the middle of the receiving tray.
The Learned Policy
In the simulation, after 1500 grasps training, our equivariant model converges to the grasp success rate of 93.9%.
In the robot, after 600 grasps training, our equivariant model achieves a grasp success rate of 95%.
Video
If the video does not display properly, please clik this video link.