
About me
I am an applied scientist at Amazon Robotics, working on robotics and machine learning. My research interests include leveraging robot manipulation by imitation learning, reinforcement learning, and streamlining robotic systems to fulfill real-world applications. Currently, I am working on robotic foundation models.
Besides being passionate about robotics, I also enjoy mountain and road biking, climbing, photography, and watching inspiring videos on YouTube.
Work
- (2025-Present) Amazon Robotics, supervised by Kapil Katyal.
Internship
- (2024 Summer) Amazon Robotics, supervised by Jane Shi and Fan Wang.
- (2023 Summer) Robotics and AI Institute, supervised by Prof. Aaron Dollar.
Education
(2020-2025) Ph.D., Khoury College of Computer Sciences , Northeastern University. I worked in The Helping Hands Lab, advised by Professor Robert Platt and collaborated with Professor Robin Walters.
(2017-2020) M.S, Robotics, Northeastern University, Boston, MA, USA
(2013-2017) B.S, Automation, South China University of Technology, Guangzhou, Guangdong, China
Publication
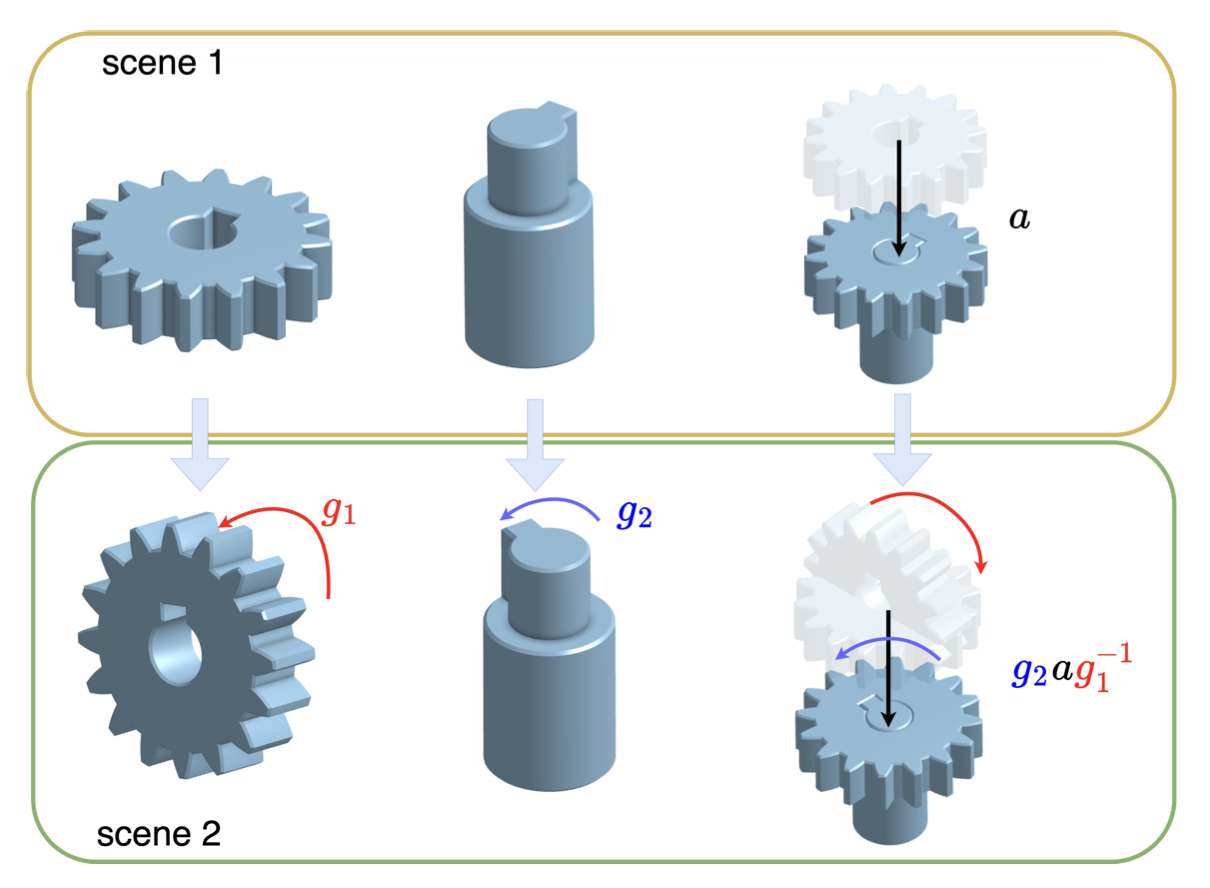
 EquAct: An SE(3)-Equivariant Multi-Task Transformer for 3D Robotic Manipulation
EquAct: An SE(3)-Equivariant Multi-Task Transformer for 3D Robotic Manipulation
Xupeng Zhu, Yu Qi*, Yizhe Zhu*, Robin Walter†, Robert Platt†
ICLR 2026
(OpenReview) (Code) (Video) ` `
` `
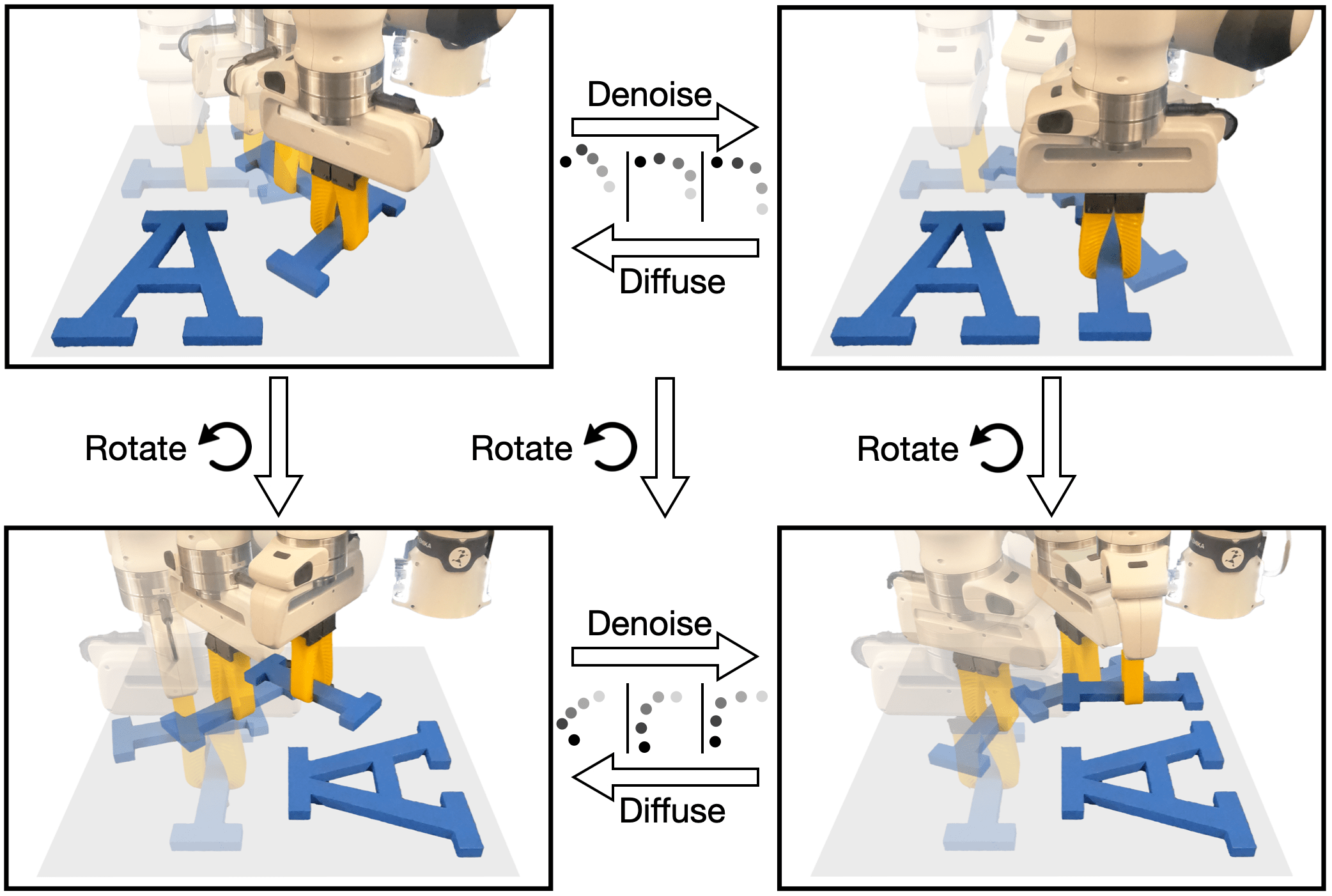 Equivariant Diffusion Policy for Sample-Efficient Robotic Manipulation
Equivariant Diffusion Policy for Sample-Efficient Robotic Manipulation
Dian Wang, Stephen Hart, David Surovik, Tarik Kelestemur, Haojie Huang, Haibo Zhao, Mark Yeatman, Xupeng Zhu, Boce Hu, Mingxi Jia, Jiuguang Wang, Robin Walters, Robert Platt
IJRR 2026
(PDF) ` `
` `
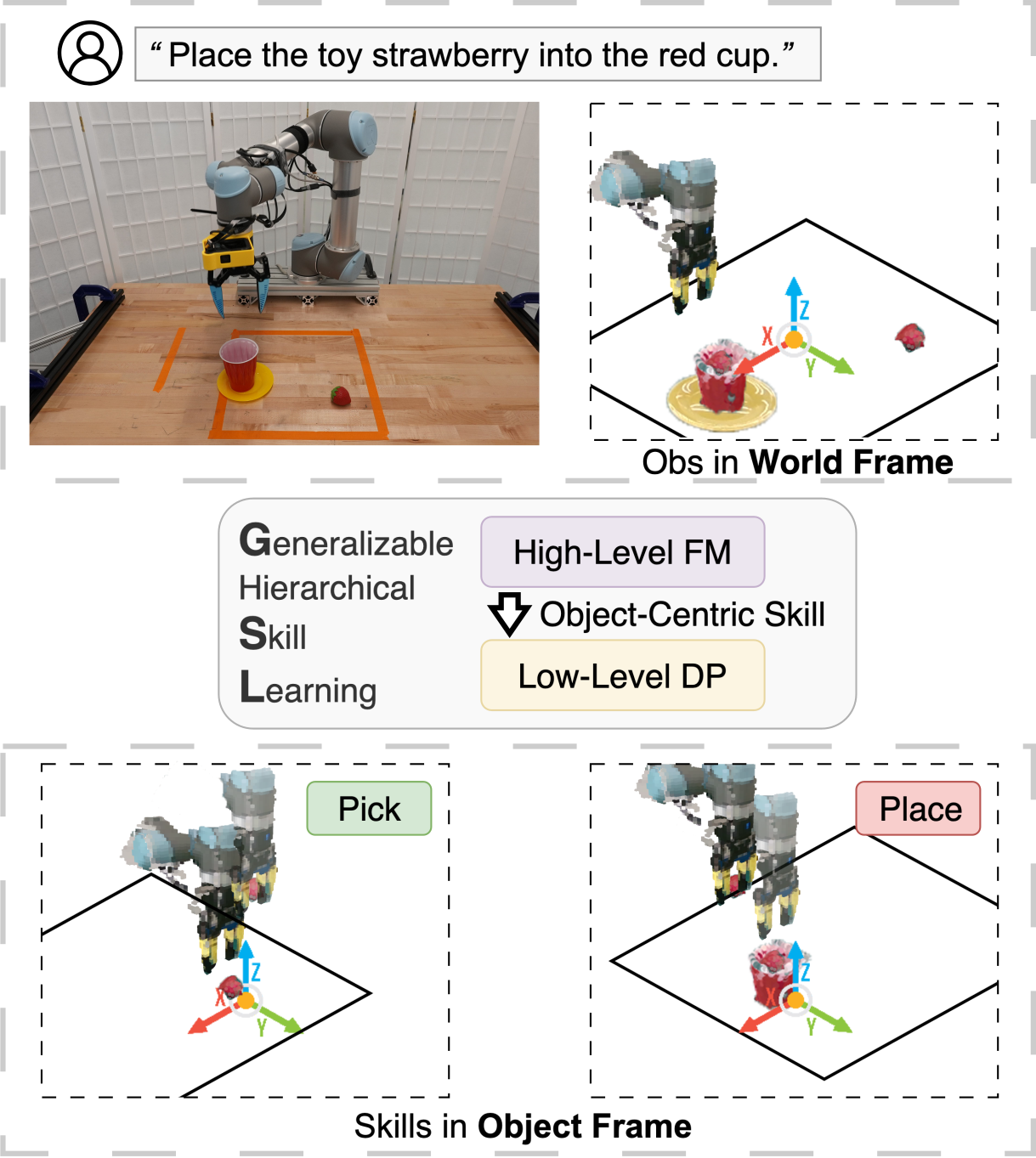 Generalizable Hierarchical Skill Learning via Object-Centric Representation
Generalizable Hierarchical Skill Learning via Object-Centric Representation
Haibo Zhao, Yu Qi, Boce Hu, Yizhe Zhu, Ziyan Chen, Xupeng Zhu, Owen Howell, Haojie Huang, Robin Walters, Dian Wang†, Robert Platt†
RAL 2026
(PDF) (Code) ` `
` `
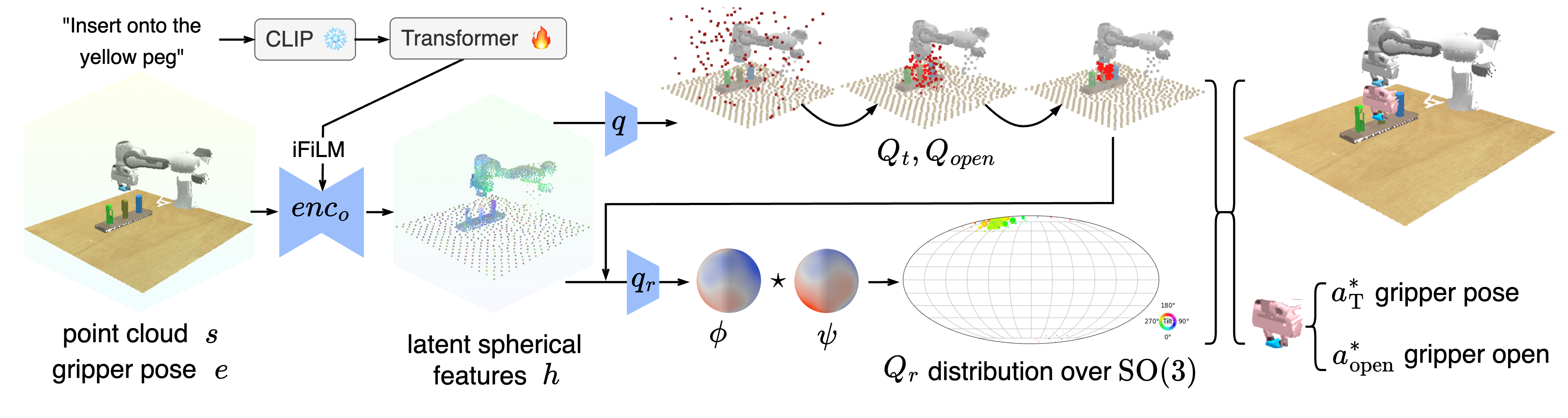
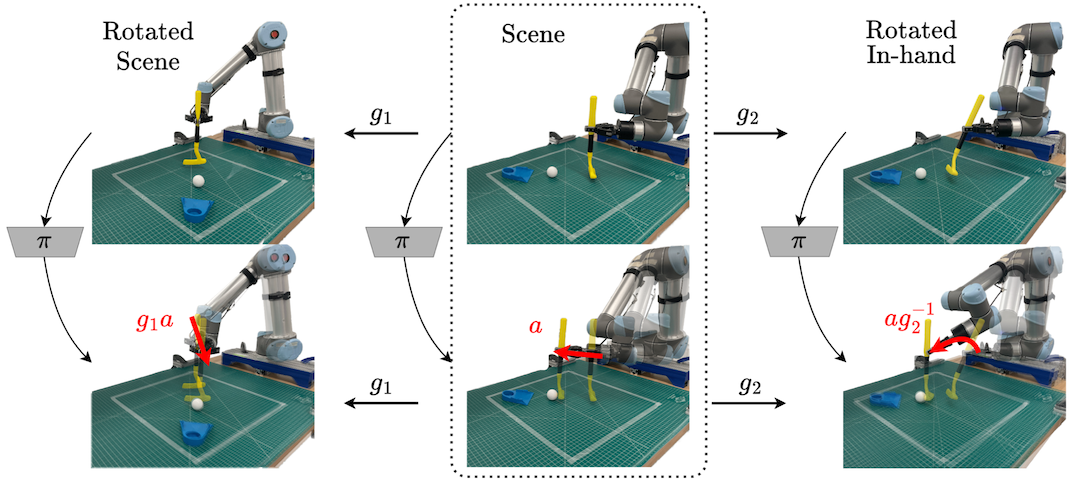
 SE(3)-Equivariant Diffusion Policy in Spherical Fourier Space
SE(3)-Equivariant Diffusion Policy in Spherical Fourier Space
Xupeng Zhu, Fan Wang, Robin Walters, Jane Shi
ICML 2025
(OpenReview) (Code)
(Video) (Arxiv) ` `
` `
 Push-Grasp Policy Learning Using Equivariant Models and Grasp Score Optimization
Push-Grasp Policy Learning Using Equivariant Models and Grasp Score Optimization
Boce Hu*, Heng Tian*, Dian Wang, Haojie Huang, Xupeng Zhu, Robin Walters, Robert Platt
RAL 2025
(PDF) (Code) ` `
` `
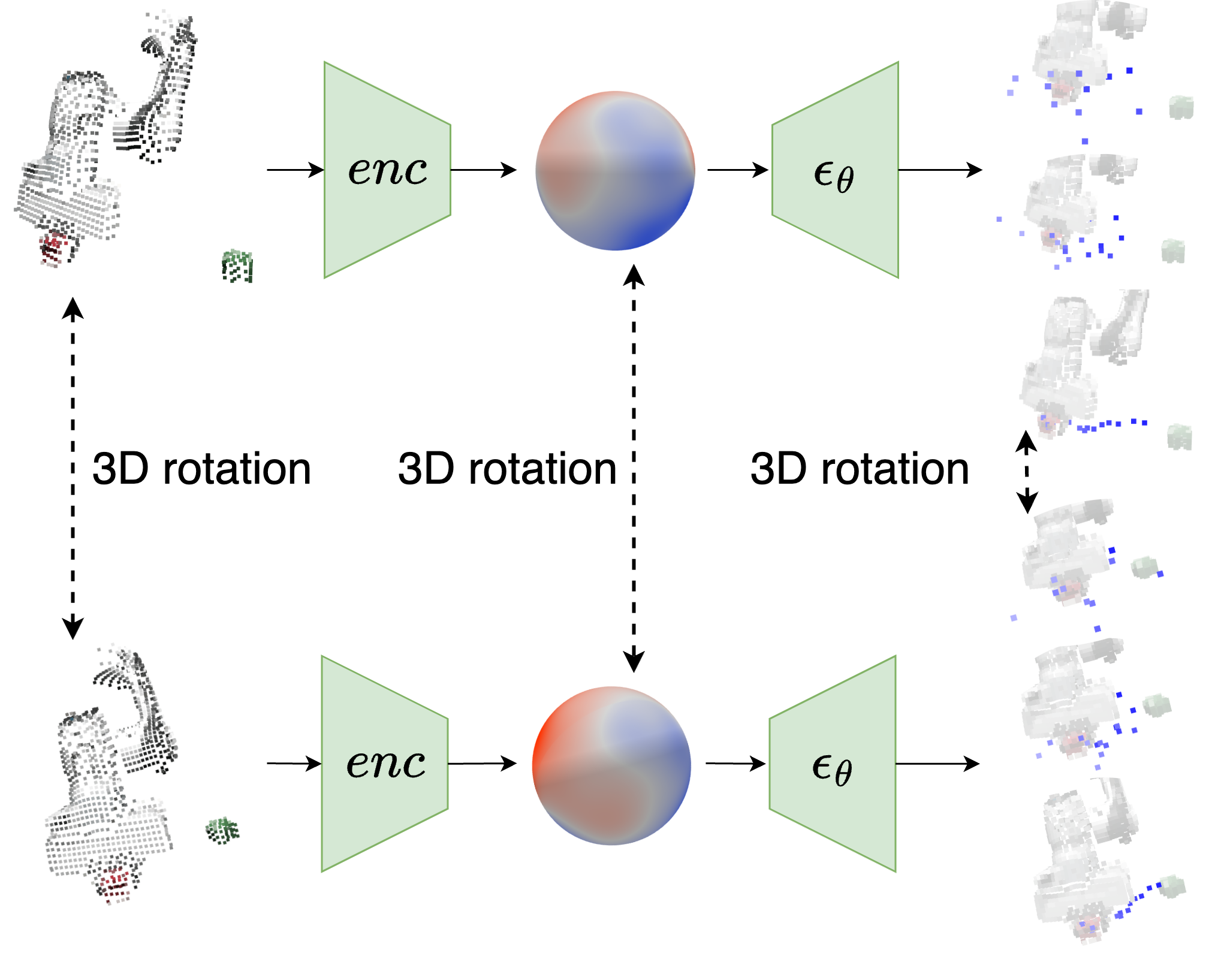
 3D Equivariant Visuomotor Policy Learning via Spherical Projection
3D Equivariant Visuomotor Policy Learning via Spherical Projection
Boce Hu, Dian Wang, David Klee, Heng Tian, Xupeng Zhu, Haojie Huang, Robert Platt, Robin Walters
NeurIPS 2025, Spotlight
(PDF) ` `
` `
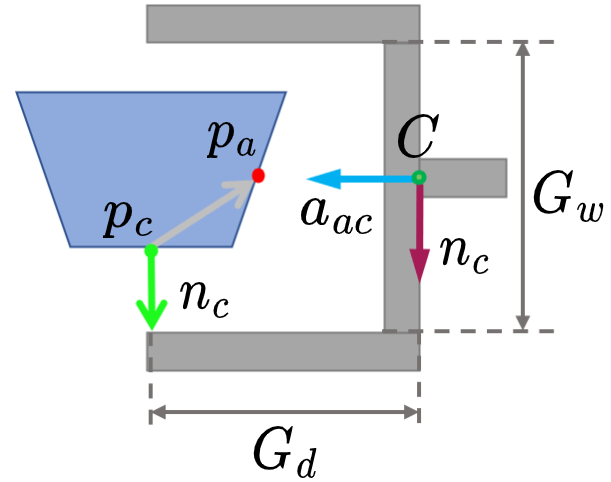
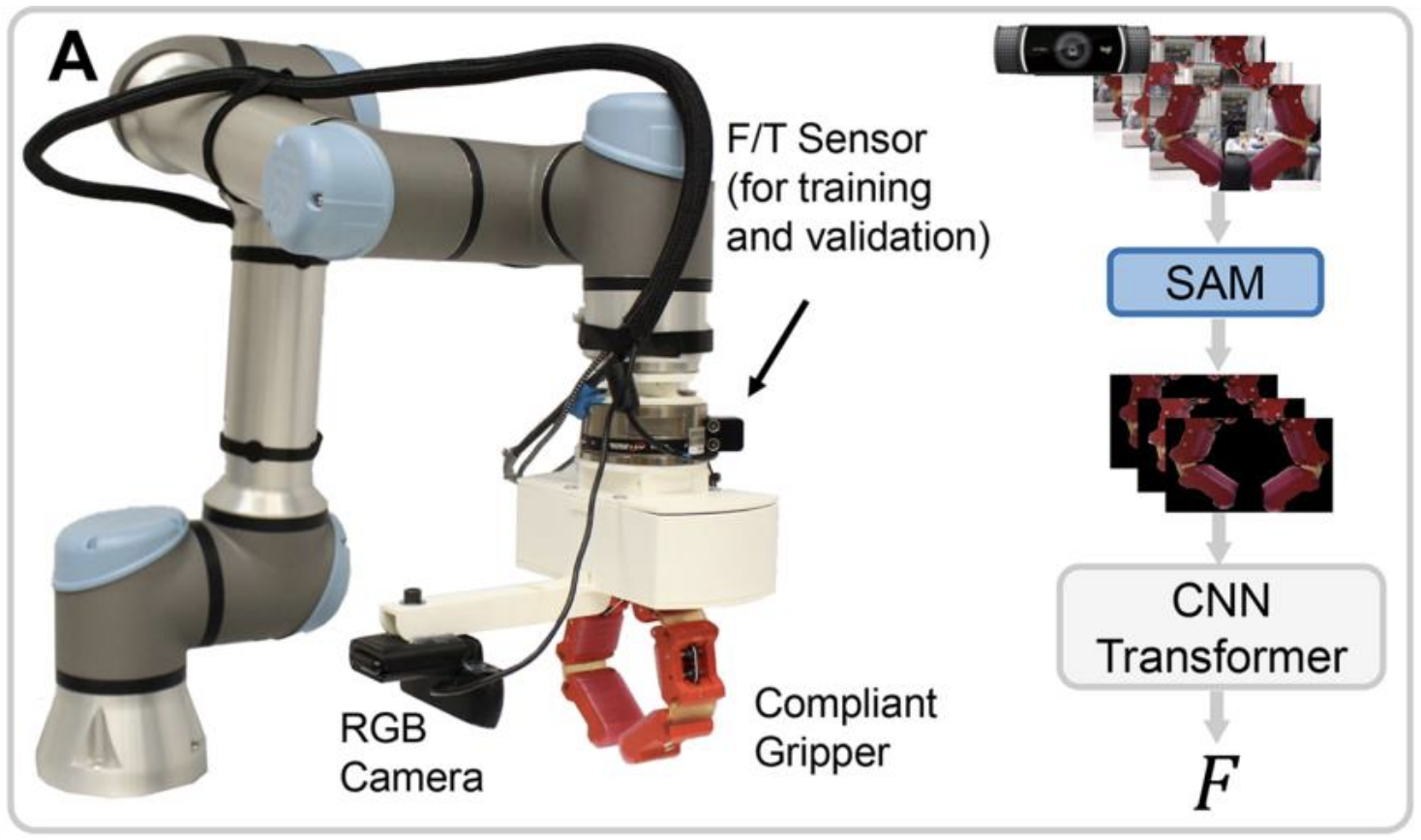 Forces for Free: Vision-Based Contact Force Estimation with a Compliant Hand
Forces for Free: Vision-Based Contact Force Estimation with a Compliant Hand
Yifan Zhu*, Mei Hao*, Xupeng Zhu*, Quentin Bateux, Alex Wong, Aaron M. Dollar
Science Robotics, Volume 10, Issue 103, Jun 2025
(PDF)
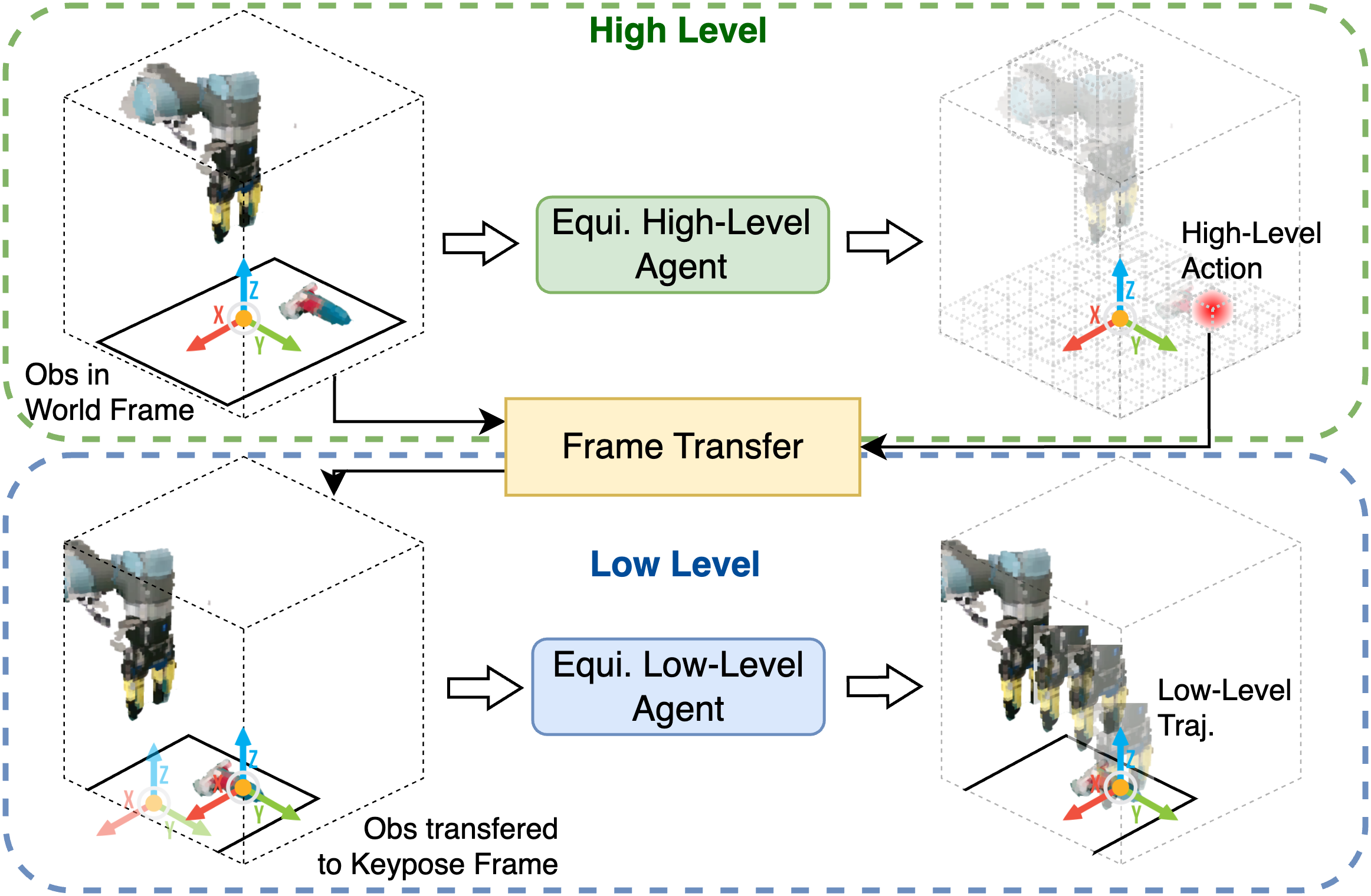 Hierarchical Equivariant Policy via Frame Transfer
Hierarchical Equivariant Policy via Frame Transfer
Haibo Zhao*, Dian Wang*, Yizhe Zhu, Xupeng Zhu, Owen Howell, Linfeng Zhao, Yaoyao Qian, Robin Walters, Robert Platt
ICML 2025
(Arxiv) ` `
` `
 Coarse-to-Fine 3D Keyframe Transporter
Coarse-to-Fine 3D Keyframe Transporter
Xupeng Zhu, David Klee*, Dian Wang*, Boce Hu, Haojie Huang, Arsh Tangri, Robin Walters, Robert Platt
Preprint
(Arxiv) ` `
` `
 Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Haojie Huang, Owen Lewis Howell*, Dian Wang*, Xupeng Zhu*, Robert Platt†, Robin Walters†
ICLR 2024, Vienna, Austria
(Website) (Openreview) (Video) ` `
` `
 A General Theory of Correct, Incorrect, and Extrinsic Equivariance
A General Theory of Correct, Incorrect, and Extrinsic Equivariance
Dian Wang, Xupeng Zhu, Jung Yeon Park, Robert Platt, Robin Walters
NeurIPS 2023
(PDF) (Code) (Video) ` `
` `
 On Robot Grasp Learning Using Equivariant Models
On Robot Grasp Learning Using Equivariant Models
Xupeng Zhu, Dian Wang, Guanang Su, Ondrej Biza, Robin Walters, Robert Platt
Autonomous Robots. 2023
(PDF) (Code) (Video) (Website) (Arxiv) ` `
` `
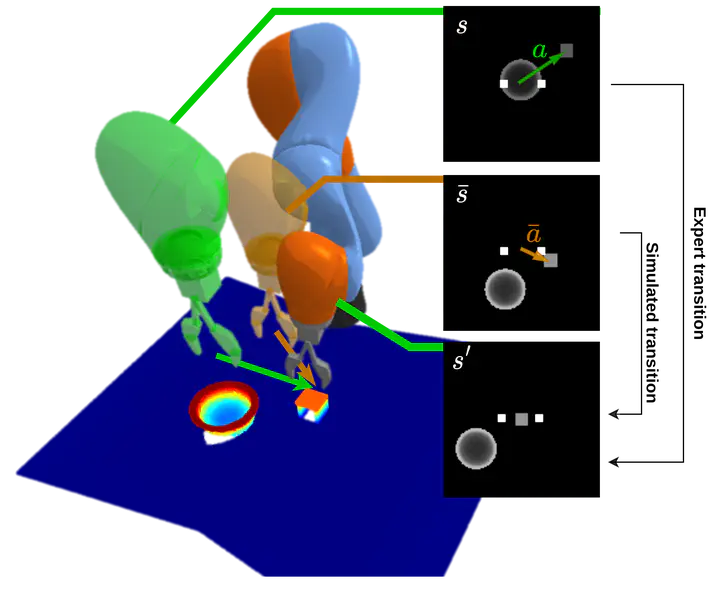 SEIL: Simulation-augmented Equivariant Imitation Learning
SEIL: Simulation-augmented Equivariant Imitation Learning
Mingxi Jia*, Dian Wang*, Guanang Su, David Klee, Xupeng Zhu, Robin Walters, Robert Platt
* Equal Contribution
ICRA 2023, London, UK
(PDF) (Page) (Video) ` `
` `
 Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Haojie Huang, Dian Wang, Xupeng Zhu, Robin Walters, Robert Platt
ICRA 2023, London, UK
(PDF) (Page) (Code) ` `
` `
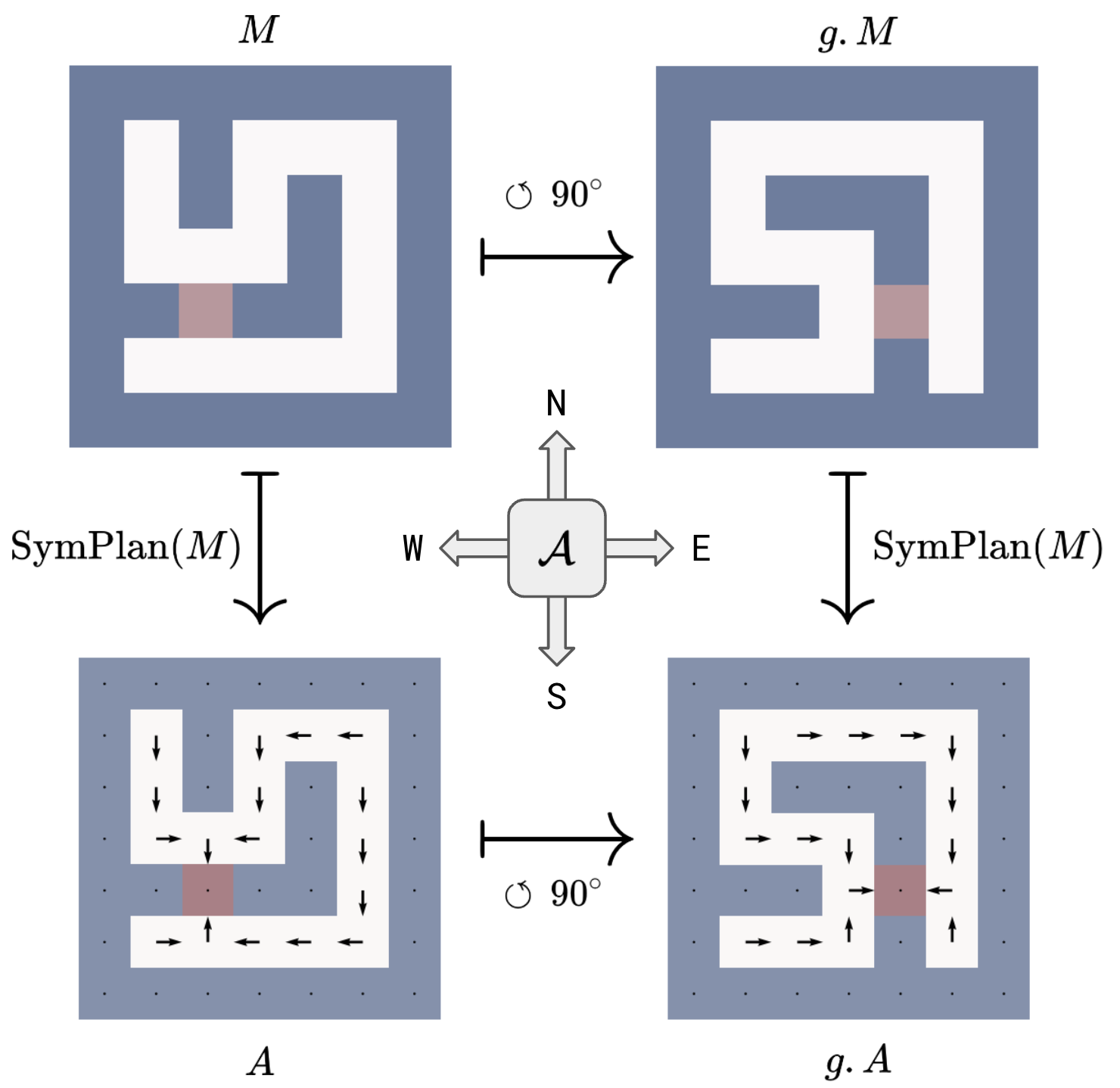 Integrating Symmetry into Differentiable Planning with Steerable Convolutions
Integrating Symmetry into Differentiable Planning with Steerable Convolutions
Linfeng Zhao, Xupeng Zhu*, Lingzhi Kong*, Robin Walters, Lawson L.S. Wong
ICLR 2023, RLDM 2022
(PDF) (Code) (Page) ` `
` `
 On-Robot Learning With Equivariant Models
On-Robot Learning With Equivariant Models
Dian Wang, Mingxi Jia, Xupeng Zhu, Robin Walters, Robert Platt
CoRL 2022, Auckland, New Zealand
(Webpage) (PDF) (OpenReview) (Video) ` `
` `
 BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
BulletArm: An Open-Source Robotic Manipulation Benchmark and Learning Framework
Dian Wang, Colin Kohler, Xupeng Zhu, Mingxi Jia, Robert Platt
ISRR 2022, Geneva, Switzerland
(PDF) (Code) ` `
` `
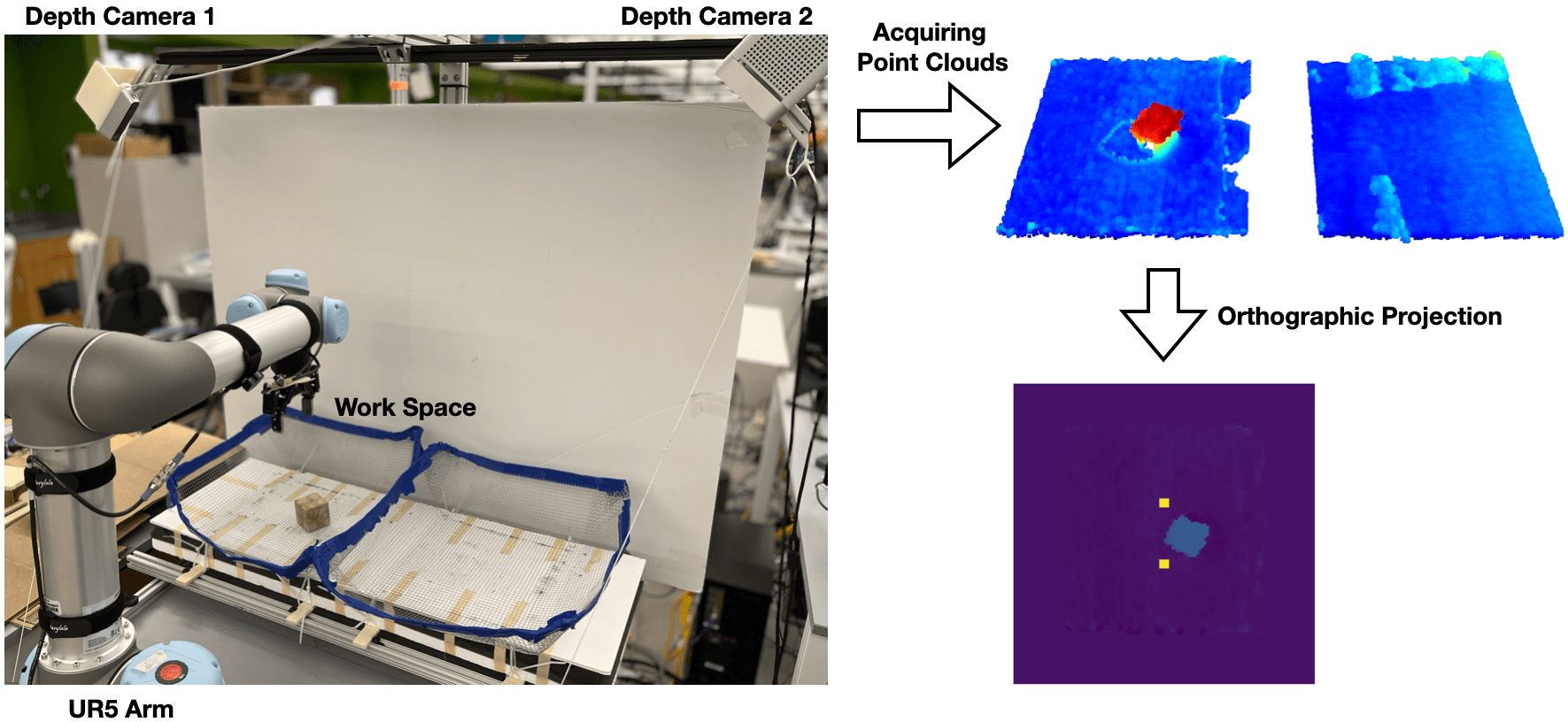
 Sample Efficient Grasp Learning Using Equivariant Models
Sample Efficient Grasp Learning Using Equivariant Models
Xupeng Zhu, Dian Wang, Ondrej Biza, Guanang Su, Robin Walters, Robert Platt
RSS 2022, New York, USA
(PDF) (Code) (Website) (Video) ` `
` `
 Equivariant Q Learning in Spatial Action Spaces
Equivariant Q Learning in Spatial Action Spaces
Dian Wang, Robin Walters, Xupeng Zhu, Robert Platt
CoRL 2021, London, UK
(PDF) (OpenReview) (Poster) (Page) (Video) (Code) ` `
` `
 Two Hybrid End-Effector Posture-Maintaining and Obstacle-Limits Avoidance Schemes for Redundant Robot Manipulators
Two Hybrid End-Effector Posture-Maintaining and Obstacle-Limits Avoidance Schemes for Redundant Robot Manipulators
Zhijun Zhang, Siyuan Chen, Xupeng Zhu, Ziyi Yan
IEEE Transactions on Industrial Informatics, vol. 16, no. 2, pp. 754-763, Feb. 2020
(PDF) ` `
` `
* indicates equal contribution; † indicates equal advising.
Service
Reviewer: ICML2025, CoRL2024-2022, ICRA2024-2023, T-RO2022
Teaching Assistant: CS5180 Reinforcement Learning, CS5100 Introduction to AI